SSRパーツ作成
- 2010年2月19日
- 読了時間: 22分
注意:この記事はブロガリに掲載したSSRパーツ作成時の複数記事(2009.10.15~2010.2.19)を再編集してまとめた記事です。

SSR(Standard Super Robot)をコンセプトにパーツ作成を開始。
結果はあまりStandardとは言えず、どちらかと言えば使い勝手が悪い結果になってしまいました。
#1

元データの作成は、今はOSの都合で使えなくなってしまったFree版の六角大王を使用。
先ずは1体のロボットを部位毎のパーツで作成し、全てのパーツを作成する事でパーツ群を完了させることにしました。
今回は頭部がほぼカタチになったので画像をUp。
#2

膝から下部分です。
細いつま先、高いヒールに後方へ伸ばしたフィンは、ヘビーメタルの影響を受けまくています。
脛の内部機構は後ろから見える構造。
#3

踵の上辺りから、脹脛の辺りにパーツを追加。
#4
今度は上の方から、襟部分を開始。

内側から面を作成して外側に伸ばしていますが、効率良く作るなら円柱を変形した方が良いと思います。
この時は、効率を意識していなかったので思いつくままに突っ走っています。。。

厚みと、窪みを追加して完成形に近づきました。
#5

最初に作成していた頭部に襟を合わせてみました。
当時、「大きさのバランスが悩ましいところですけど、こんな感じで行けるかなぁ。。。」と感じていた通り、各パーツの大きさをどの位にバランスさせるかは難しいところです。
#6
ロボットの上半身(BBSの画像を参照)は、有る程度カタチになってきたので、ここからはロボットの腰まわりの装備から製作して行きます。 先ずは基本となるアーマー(装甲板)です。ロボットとは言っても鎧をデザインするような感じになります。これをベースにして肩と同様の構造でレイヤー状のパーツを追加して行きます。
六角大王の作業では装甲の表と裏の様に、同じ様な面を重ねた際、透かして見たときのそれぞれ対応する頂点が微妙にずれてしまうこともあるのですが(私の操作方法がまずいだけとも。。。)、一旦メタセコイアでファイルを修正して頂点を揃えました。 六角大王とメタセコイアの二つのソフトの間で、形状に関してほぼ自由に情報を受け渡せる(はず)ので、どちらか使いやすい方のソフトで作業を行うことが出来ます。 面と面のスムージングの具合(不要な角がスムージングされる)を調整する際もメタセコイアの方が楽な場合があります。 ただ、直感的に絵を描く様に操作するには六角大王の方が「自分としては好き」なので、何も無いところからデザインする場合、六角大王で作業を開始します。

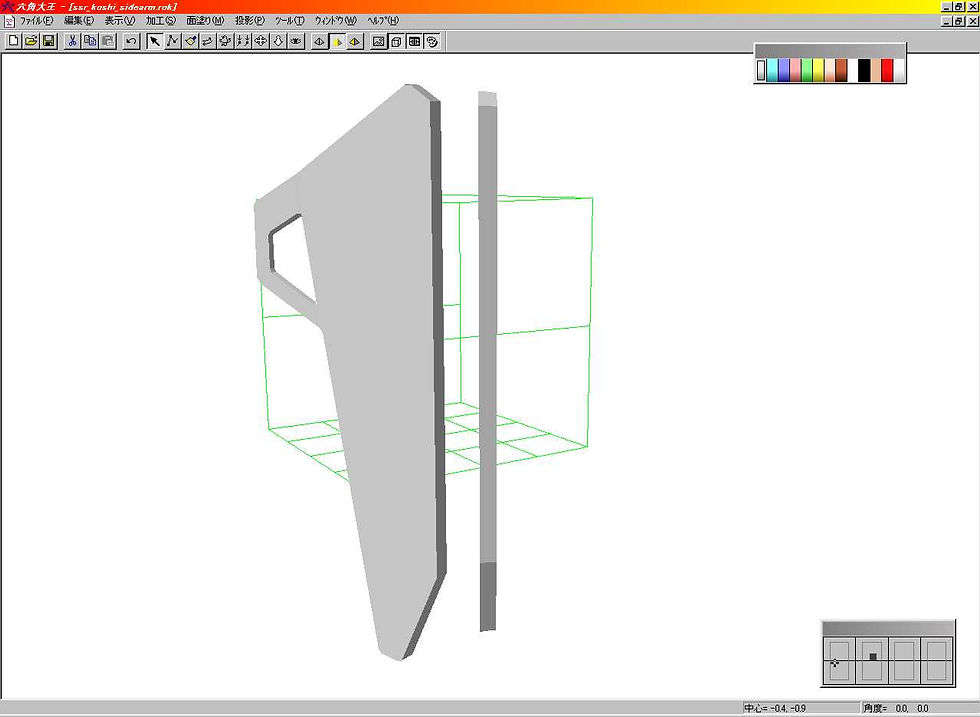
先のサイドアーマーを「隠す」コマンドで透かし、真横から透視した上に追加したいパーツのイメージを追加して行きます。 メインとなる元のパーツの輪郭に沿って立体をイメージしながら何となく気分で描いて行きます。
左からエッジ部分、ダクト、追加装甲、右端が全て重ねた状態って感じです。細部はまだ修正が必要ですけどね。 昨日の2Dイメージを元にして、一番手間がかかったのはダクトでした。もっと単純なカタチにしておけば良かった。

#7

BBSで公開していたボディ(上半身)にサイドアーマーをレイアウトしてみました。上は六角大王のスナップショットですが、部分的に面の上下が逆転してしまっていて見辛いので六角大王のファイルをメタセコイアから開いて試しにレンダリングしてみたのが下です。

単純にそのままレンダリングすると角が丸まりすぎてしまうので、スムージングの角度を鋭角(45度や30度)に設定しています。(各パーツの面と面の接続を滑らかに表示する角度の閾値を設定) この設定値が適切かどうか、私はプロではないので、あくまで個人的に観て「このぐらいで良いかなぁ」な程度の数値と考えてください。 良く観ると、サイドアーマーの背中側の部品や、腰の背中側の部品などはスムージングの設定を変更していない為、角が丸いままなのが判ると思います。 メタセコイアのレンダリングでは他に照明の方向を何となく六角大王と同じ様な向きに変えてサイズも1024x768にしてみました。拡大具合が適当だったので画面に対して小さめになってます。悪しからず。
#8
新規に作成、追加したパーツです。判り難いので青く塗っています。

腰の中央部と両サイドです。 腹部はまだ無いのでスカスカの為寂しいのですが、なかなか良いデザインが浮かばないので、周辺から攻めて(作り込んで)みれば上手く行くかなぁ~と考えました。
両サイドのパーツは正面からの2Dイメージだけ考えておいて、実際の作業では六角大王の立体化機能を使ってざっくりと作り込んで行きました。 中央のパーツは単体でも流用し易くする為、本来は不要な裏側の作りこみも行っています。
#9
今回も新規に作成、追加したパーツです。判り難いので青く塗っています。

以前に作成済みの胸部パーツの延長線上に腕の関節部となるパーツ、肩甲骨辺りのパーツ、左右を接続する中央のパーツの3種類です。 背面側パーツには、バックパック(主推進器)を背負う為、接続用ラッチの窪みを数個、設けてみました。 下は胸部のみのスナップショットで、更に背骨側パーツと脇の下のそれっぽい(笑)パーツを追加しました。

腹部のデザインって、「他の何か」となるべく似ないようにするのって難しいですね。柔軟に動くことを考えると単なるユニバーサルジョイントか、ジャバラ状になってしまうので、線を少なくして行くと結局どれも似たような感じになってしまいそうです。
#11
気分を変えてモモのあたりを開始します。 下は左が作成済みの「スネ」になります。ところで「クルブシ」をはさむパーツって何となく作り直したいかも。。歩いたときに引っかかりそう。

右が新規パーツの作成画面で、いつもの通り、作成済みの脛を真横にして、これをベースに2Dイメージで大腿部のカタチを作ってゆきます。脛のデザインがサンドイッチ構造なので大腿部も同じ様にしたいと思います。前から見た時に真中のパーツを左右から挟む構造です。
#12
左が昨日の2Dイメージから作成した大腿部(ふともも)です。これとスネを合わせたのが右になります。当初の予定よりも膝関節の横幅が増えてしまったのでスネ側の関節部カバーを幅広化して対応。結果、膝関節部のボリュームが増して落着き感が出たような気がします。

下は更にボディと先ほどのアシを合わせた結果です。 絵としてのポージングは膝関節のの曲がり具合がちょっとキツイので正面から見ると若干アシが短く見えますが、全体のバランスを観るには充分な感じです。 やっと全体のイメージが掴めるようになってきました。見た感じの印象はどうでしょうか?

最初に出来あがりを考えないで突っ走っている(笑)ので、ちょっと安心出来る様になりました。 残りの腹部、碗部、背部バックパック、装備品を作成したらメタセコイアに移行出来ます、、が、まだ暫くかかりそうですね。。。
#13
青いパーツが追加パーツです。あまり深く考えずにつくった方が良いのでは?と思い、こんな感じになりました。中央や下側のパーツとの隙間など更にパーツを追加してゆきます。

前回作成した腹部パーツの周辺パーツを追加しました。 中央部分の隙間を埋める両脇のパーツと、背中側は背骨をイメージする2つのパーツで、計3つのパーツです。それぞれ青色に塗り分けてあるパーツがそれです。

今回も面の分割線を表示した「ビューモード」のスナップショットです。「線」が表示される方が見やすいみたいです。
#14
前回作成した青塗りパーツを支える構造の腰内部パーツ(赤塗り)を追加。

周囲のパーツとの接合面に合わせた外形としましたが、更にパーツ単体で流用される事を考慮したので、この状態では見えない部分にもディテールを追加しています。見えない苦労が。。。
#15
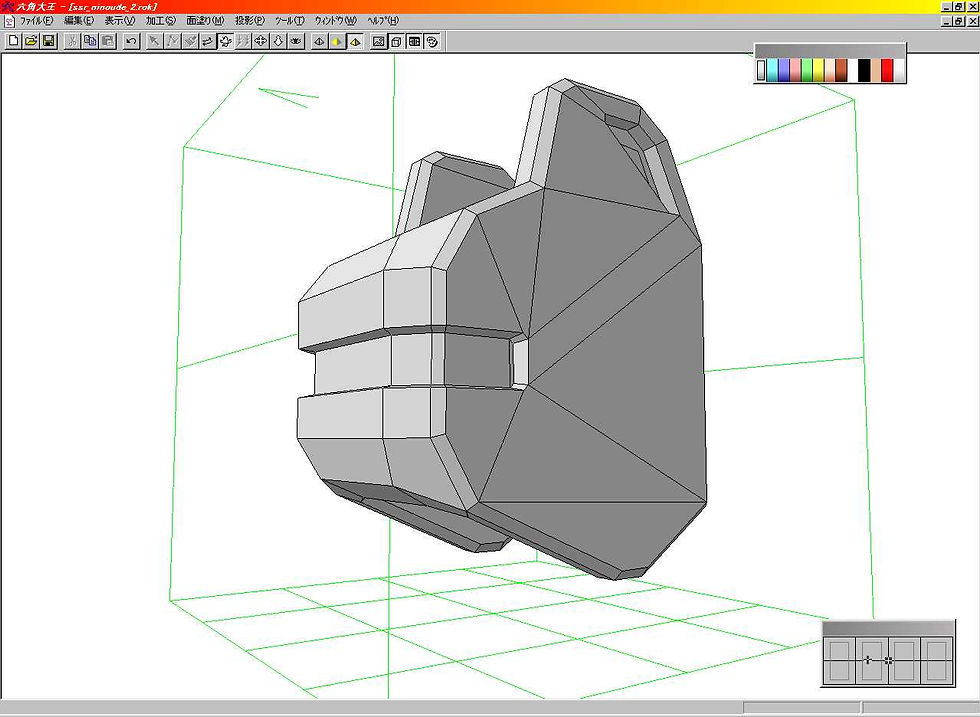
上腕です。
下腕部分のパーツを作成しました。

周囲の線画は下書きです。下書きをベースにデコレーション用パーツを追加したいと思います
腕の追加パーツ。

なんだか脚と比較すると少しバランスが違うような。 もっとスリムにつくるはずだったのだけど。中心になるパーツが太過ぎるのが問題みたいです。どうしよう、つくり直すかそれとも、とりあえずこのままで行くか?
先に作成していた大仰な肩装甲の中にあって殆ど見えない、内部関節部分を追加しました。

うぅ~ん、どこかで見たことが有るような、無いような、、、正面から見る形状が概ね菱形ならばどれも似たような形になってしまうので、そんなもんですよね?? この追加パーツと「ちからこぶ」の間を埋める追加パーツを更に検討中です。
一つは「肩関節」パーツと「ちからこぶ」パーツとの間を埋める「ワキ」の部分みたいなパーツ、二つ目に「ちからこぶ」パーツの外側に張りつくダクト状のパーツを追加。
画面奥の青塗りが「ワキ」パーツ、「肩関節」パーツのボディ側には窪みを設けてあります。 画面手前の青塗りがダクト状のパーツです。この角度だと見えませんが、ダクトは反対側にも似たような形状の穴を開けてあります。

今回、一枚の絵で表と裏を載せたかったので、腕パーツ全体をもう一つ配置しています。
(六角大王の初心者tips:六角大王は左右対称にしか作れないので、実は手前の「腕パーツ」の反対側は面を削除して見えない様に隠しています。なので、左奥には見えない「腕パーツ」が隠れているので、全部で3つの「腕パーツ」を配置しいることになります。 「◇ ■ ◆」な感じで配置しています)
#16
ここまで六角大王で、作ってきたオリジナル・ロボット用パーツですが、その他の細かいパーツ(手とか、背部バックパックとか、重要な物も有りますが)は取りあえず置いておいて(笑) 今回は少し先に進む準備をしたいと思います。
作業フローを簡単にまとめると、以下の様になります。
1.六角大王:ざっくりモデリング 2.メタセコイア:頂点の整列、UVマッピング、サイズの修正、SUFファイルへ変換等など (UVマッピングが、不要な場合は「パーツデータコンバータ」を使うのも方法です) 3.マッピング画像の作成(省略可能。て言うか、今回はやらないかも) 4.DOGA L3:パーツアセンブラで組みたて検証 5.不具合が有れば2へ戻る、無ければ6へ進む 6.SUFファイルの公開。。。やったぁ!わぁ~い!
2項に進む前に、今回は新しいロボパーツの大きさを決めるため、既存のロボット用パーツの大きさを確認してみます。 下はL3のパーツアセンブラ(PA)でロボット用の胸パーツを並べてみたスナップショットです。PAのバージョンが古いのは許してください m(__)m 近々アップデートします。(※本画像の著作権はLINK先にあるDOGAのにあります。念の為。)

中でも一番大きなRB02.suf(黄色反転しているパーツ)の大きさを寸法の基準(許される最大値)とすることにします。
次にメタセコイアから先のRB02.sufファイルを開いてみます。 (メタセコイアのバージョンは2.4.8を使用)

「SUF Import」のダイアログが出ましたが、幸運な事に拡大率=1倍でしたので、そのまま開いてみました( 左右反転のチェックは外しています)。
下はRB02.sufを開いたメタセコイアのスナップショットです。

作業用のメッシュに対して左右と後は目いっぱいですが、前側はメッシュから外にはみ出ています。 よって、オリジナル・ロボの胸パーツの大きさもメッシュに丁度納まる程度の大きさの方が何かと問題が少なそうです。
。。。そういえば、以前に作成したオリジナルパーツでは、PAで極端に縮小するとカタチが微妙に歪んでしまったことがありました。また、ある程度以下の縮尺には縮小出来ないので既存の似たようなパーツに近いサイズでSUFファイル化するのが無難かなと思います。尚、これらの縮小による現象は私のPC環境で発生したもので、最新のLシリーズでも発生するかどうかは未確認です。
#17
中途半端だった胸部中央のパーツは、オーソドックスな形状ですが作りなおしました。 また、両肩に載っている三角断面のノズル形状のパーツも後半分が未完成だったので修正しました。

#18
六角大王で作成したロボの主なボディパーツを一度にメタセコイアへ取り込み、SUF化への作業を始めました。
ここでは、大きさの調整、面の統一、オブジェクト名称の割当て、材質の設定、スムージング角度の設定、ミラーリングも少し行っています。

予め調べてあったDOGA Lシリーズのロボット用胸パーツの大きさに近くなるようにする為、取り込み時の拡大率はデフォルトの2倍で行った後、全てのパーツを選択してさらに1.9倍しています。 丁度胸のパーツの左右がメッシュの左右の幅いっぱい程度になりました。
六角大王で作業時に、各パーツをグループ化しておくと、メタセコイアに取り込んだ時にパーツ=グループは各オブジェクトに自動で変換されます。スナップショット右上のオブジェクトウインドウには名前を振り直した各パーツのオブジェクト名が読めます。命名の仕方って悩みますよね。
六角大王とメタセコイアでは「面」の情報の受け渡しがうまく行われない(六角大王が面の裏表を意識していない??)ようです。 パーツを取り込み後、裏返っているオブジェクトの面を反転して正しい向きに揃えます。また、同時にスムージングの角度を変更し、エッジの調整をざっくりと行いました。
最後に面の材質をLシリーズと同じ材質名(アトリビュート名)「BodyM」に変更し、不要な材質は削除しています。
アトリビュート名:DOGA Lシリーズの***.sufファイルをメモ帳等のテキストエディタで開くと、そのパーツがどのようなアトリビュートを使っているのか直接調べる事が事が出来ます。パーツデータコンバータを起動して遊んで見るとアトリビュートの名称と特徴を知ることが出来ます。
#19
地味な作業を続けています。 一度に取り込んだパーツをオブジェクト毎に修正して行きます。 脇の下に配置されていたノズル状のパーツを修正したスナップショットです。

右上のオブジェクトウインドウで上から目玉マークのオブジェクトまでの下記修正が完了しました。
主な修正内容ですが、順番は前後(往復も)しています。
・直線を直線らしく修正します。自分では直線になる様に並べていた頂点がジグザグになっている個所を、範囲指定でまとめて選択して、「選択部処理」の「頂点の位置を揃える」コマンドを実行します。私の場合、F1orF2orF3キーを押して頂点を一度に選択し易い様に視点を変えながら作業しています。個別の頂点は「移動」コマンドで、地道に移動しますが、shiftキーとF*キーを同時に押すと通常のF*キーの時と裏側(反対側)が見えるので、この機能に気が付いてからは作業が大分楽になりました。
・オブジェクトの角度の修正をします。今まで、ロボの構成パーツとして配置されていたパーツは、組合されたときに最適な角度(傾き)になっています。これを、DOGA Lシリーズで汎用パーツとして使うときに使いやすい角度(カタチとして安定したというか、素直な傾き=メタセコイアでUVマッピングを行いやすい傾き)に「回転」コマンドで修正します。
・オブジェクトの位置合わせを行います。「原点」メッシュの中心へ、「オブジェクト」の「位置合わせ」で移動させます。この原点位置がDOGA Lシリーズのパーツアセンブラでパーツを呼び出した時の回転や拡大縮小の中心(赤い四角)になります。なのでLシリーズの時い極端な変形をされても問題が無さそうな(笑)辺りを考慮して原点位置を決めます。 下のパーツアセンブラで選択された胸パーツ(RB02)の赤四角がメタセコイアの原点位置になります。
・頂点の移動にからみ、スムージングの調整をします。面と面を繋ぐ「辺」で、オブジェクト設定のスムージング角度だけでは思うようにエッジが立たない場合が有るのでこの場合は影の付き方を見ながら「辺」の両脇の頂点位置を修正して行きます。
・ミラーリングの活用。正面から見て、左右両方の頂点を同じ様に修正するのは面倒なので、一度ナイフコマンドで真っ二つにしてから片側を削除、残った方だけ修正し、終ったらミラーリング→ミラーのフリーズを行って元に戻し、中心に残ったナイフの切り跡?は、やはりナイフコマンドの「接続辺を連続削除」で修正しています。左右対象の編集機能も有るのですが、うっかり設定を戻し忘れて、ぐちゃっと崩れるのが嫌なのでミラー機能を使っています。
っと、こんな感じでしょうか、他にも気が付いたら追記します。
#20
昨日の調整が一段落したので、UVマッピングを開始しました。 (一段落といっても未だロボのボディ部分しかメタセコイアに取り込んでいないですけどネ) 下は胸のパーツのUV操作画面のスナップショットです。
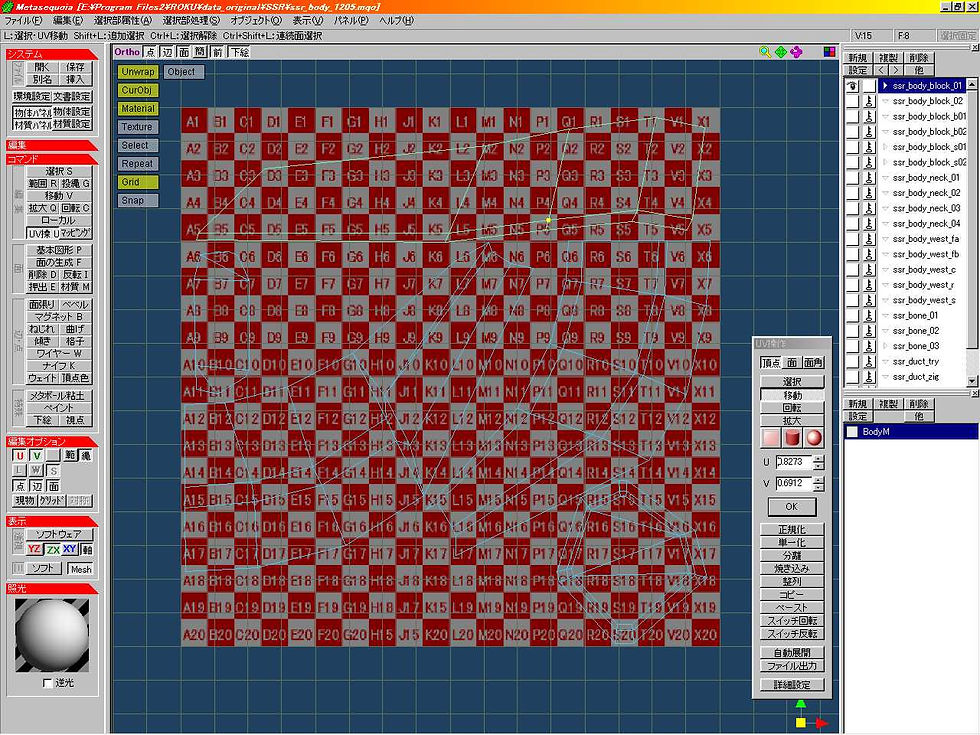
物凄く見辛いですが、赤白のチェッカ模様がマッピング用のテクスチャで、その上に薄っすらと青や黄色の線がマッピングされた面の「辺」です。黄色は選択状態を示しています。
使いこなしていらっしゃる方から見れば突込み所が多いと思いますが、何分「趣味」の域なので大目に見てやってください。 手順としては、マッピングした面だけを選択し、選択した面をなるべく正面から見える様に視点を修正します。その状態で「UV操作」を押下、テクスチャの割当てたい位置に「オブジェクト」を移動したら「焼き込み」を押下すると「UVマッピング」されます。 私の場合、次の面を選択し易い様に、マッピングが終了した面は「選択面を隠す」を行っています。 全ての面の「焼き込み」が完了したら、UV操作画面でマッピングされた線を好きな位置に「移動」や、「回転」、「拡大(縮小)」します。 UVマッピングされたパーツのテクスチャを作る為に、プラグインの「UV展開図」を使わせてもらっています。このプラグインで生成されたビットマップを元にオリジナルのテクスチャを作成します。
下は、マッピング済みの胸パーツです。 ちょっとマッピングが面倒な形状にしてしまったので、外側からの見栄えを重視しています。よって内側からの見栄えは劣ってしまいました。

今までのすっきりした表面が賑やかになりました。(笑)
下はロボの背中の中央ブロックにUVマッピングを施した状態でメタセコイアの「レンダリング」機能を使ってみました。

こういった割と四角いパーツのUVマッピングは楽なんですけどね。 斜めの面が連続していると非常に面倒です。
まだまだパーツは沢山残っているので地味な作業は更に続きます。
#17
前回六角大王からメタセコイアに取り込み、UVマッピングを行なったロボの主なボディパーツの内のいくつかををDOGA L3に取り込んでみました。 UVマッピング、、、1つのパーツを仕上げるのに概ね30分程度かかってましたので、1日2時間かけても3つか4つが良い所なのでなかなか進みませんでした。
ってことでUVの設定をしたのに出来あがった絵が気に入らなかったので今回はテクスチャは無し(笑)でレンダリングしてみました。 (急いでいたので物体データを保存しないでパーツアセンブラ閉じてしまったし。。。)

なんだか、予定していたよりものっぺりしてます?? エッジがあまり立っていないような。 また、メタセコイアに戻って確認してみないといけません。
追記:2009.12.12 その後、メタセコイアで確認したのですが、スムージングの設定は正しく行なわれていました。 今回、のっぺりした絵(エッジが無い?)になってしまったのは、パーツをL3へ登録する方法に原因がありました。 詳しくは次回、「メタセコイアからDOGA L3へインポート&試し作画(マッピングの確認)」を参照願います。
メタセコイアで作成したパーツをDOGA-L3のパーツアセンブラに登録する方法として、
1つはメタセコイアの「DOGA-Lシリーズへの出力」という機能があります。ver2.4.8を使っているのですが、私の場合ではそのまま登録を行なうとスムージングの情報が上手く出力されなかったようです。(SUFの中身mでは確認していません)
2つめの方法として「別名で保存」からSUFを選択してSUF化したところ,スムージングの情報が思った通りに(メタセコイアの作業画面通り)L3のパーツアセンブラでも再現されました。

前回のものと比較するとエッジがより鋭角になっています。 また、この絵ではバンプマッピングを指定したのでマッピングの状況もわかるようになっています。
なるべく手間をかけないでL3にパーツ登録する手順として、先ずは「DOGA-Lシリーズへの出力」を使い、カタログ画像を作成します。 下は登録用のウインドウです。パーツアセンブラのカタログ画像を作成します。

右上の小さな窓の中のパーツをマウスで回転・拡大等、見やすく調整し、下の開いている場所にパーツとして登録出来ます。 その後、「別名で保存」で先のパーツ(***.sufファイル)を上書き保存してしまうことにします。
メタセコイアでUVマッピングの完了したパーツを全てL3にインポートして作画してみました。

試しレンダリングと言っても、あまりにミスボラシイ質感の絵では拙いと思い、スポット光源を6個ほど配置してみました。 マッピング画像が間に合わず、メタセコイアのレンダリングイメージと似たような感じで申し訳ありませんが、質感は多少調整したつもりなんですがどうでしょうか?
ってことで、まだまだパーツが不足しています。残りの六角大王のファイルもメタセコイアで整形とUVマッピングを行ないます。
追記:腰周辺パーツのエッジが丸いのに気が付いたのでパーツを差換えて、ついでに画像サイズを1024x768に変更しました。
最初のマッピングは真上から平面的にマッピングしていたのですが、バンプマッピングで縁に沿ってミゾを作るとき等、上手く行かない感じだったので修正してみました。

上が修正前、下が修正後です。

#18
メタセコイアでUVマッピングを実施できたパーツをDOGA-L3のパーツアセンブラで試しレンダリングしてみました。 先ずは全体。。。

次は上半身。。。

最後は足先。。。

画像サイズは前回同様に1024x768。光源の設定等も前回と全く同じです。
UV操作は、ねじれた形状のパーツが最も手間がかかるので、素直?な形状のパーツを優先しています。
それと、(当たり前のことですが)UVマップをパーツの形状に真面目に合わせているので、Lシリーズの汎用テクスチャをそのまま使うと折角のUV設定が活かせない、と言う事を今更ですが実感します。 標準のLシリーズパーツは、単純な形状に徹しているので汎用テクスチャでも、あまり問題無いのですが、ここで作成しているオリジナルパーツでは、各パーツに合わせた専用のテクスチャが是非欲しいところです。
#19
更にパーツを追加しましたので、全身のスナップショットです。 六角大王のファイルをメタセコイアに取り込んだとき、拡大率を多少変更しているので、L3のパーツアセンブラでも拡大率の調整が必要になっています。

残るは肩の大型装甲と、その他いくつか。。。
#20
肩の装甲を追加して、今回はモーションエディタでレンダリングしてみました。 物体データは「関節データ」ではないので、ポーズは付けられません。 先ずは正面。

次は背面です。

#21
早速?「多関節物体」にしてポージングしてみました。
先ずは全体。。。 「モーションエディタ」で作画。足元が暗かったので、右手前に「点光源」を1つ追加しています。

次に頭部のアップ。。。

顔の内部パーツは無いので、スカスカです。
肩と下腕、手首?のパーツに作成したテクスチャを貼って作画してみました。

肩のパーツが二重構造になっているのは、六角大王で作成していたデザインを再現するのに、肩のパーツを色を変えて縮小後、内側に配置して再現してます。 今回は「赤い」ボディで行ってみようかと思います(3倍早く出来あがる??)
#22
大分、デコレーションが進んで来たので試しレンダリングしてみました。 全て今回作成したオリジナルパーツで構成しているのでL3の標準パーツは使っていません。

プロポーションは、以前のモノより、ウエストのくびれが増えて、背が高くなってます。
#23
ってことで、お約束のアイテムを追加してみました。

右手。。。ライフル?。銃身が長い方が見栄えがするので、ついつい長めになってしまいます。その割にグリップ以降が全く無いのでバランスが悪く、手首だけで保持しているのが辛そうです。 表面に細い線が見えますが、パーツアセンブラの模様設定で「光沢」に「縦筋1」を割当てています。なんとなく「ヘアライン」調に見えなくも無いのですが、どうでしょうか。
左手。。。シールド=盾。本体のロボの腰に付属している装甲をベースに組み立てて見ました。案外それっぽいカタチになりました。 この角度では見えないので、シールドの内側には手で保持する為のグリップ等はまだ有りません。
更に、背面。

背中と腰の辺りは、「バックパック」を背負うと見えなくなってしまうのが残念。 やっぱ、ロボの構図は下からの煽りが決まりますね。 そういえば、腰の装甲も関節に相当する部分は横着して作ってありません。 2010.2.13 記事加筆。
バックパックを追加。 後方中央に上下縦に並べて主推進器を2機、上下左右に計4機の補助推進器を放射状に配置してみました。それなりに高起動な雰囲気でしょ??

バックパック=主推進器ってロボのデザイン的にはあまり大きな燃料タンクはデザイン的に五月蝿くなるので、難しいなぁと思います。 敢えて大きなタンクを付けるのも良いのですが、先人のデザインそのままになってしまう可能性が高いので、素直に付けられないのです。
推進器がロケットエンジン=燃料を燃焼したガスの勢いを推進力にするタイプでは相応のサイズのタンクが必要になります。タンクが無い推進器を見ると「何でタンクが無いのにあんなに長時間使えるの?」と、思ってしまう。嘘を絵にするにしても。それなりの説得力が欲しいですよね。 設定や文章に頼らず、絵だけで説得力が出せると良いのですが。
#24
SSRを使った「絵」が出来たので、DoGAギャラリ-</リンク>へ投稿してきました。
散々悩んで決めた割には、後で見るとちょっとイマイチだったかなぁと、いつも後悔(まさに後悔先に立たず。。。当たり前ですが)しているのですが、荒野の上空を飛ぶ宇宙船群をバックに立つSSRの勇姿?を作画。
先ずは最初に作成した没画像#1です。

背景に建物を配置、レンズを思い切り広角にして被写体のロボに肉迫?する事で迫力を狙って見ました。 まぁ、これでも良かったのですが、背景の建物の存在感が大き過ぎてしまい、ロボが「小さく感じる」気がしたので没となりました。 周囲に配置した「効果線」は気に入ったので、また別の絵で使いたいと思います。
次は没画像#2です。

宇宙ステーションの通路(そうは見えませんが)みたいな場所で、後方で起きた爆発に巻き込まれそうになりながらも、余裕で飛んでいるとしか思えないロボ。。。みたいに図らずもなってしまいました。 壁に這わせているパイプのテクスチャが、おかしな状態になっているのは本来短いパーツを細長く引き伸ばし過ぎているからだと思われます。 ロボのポーズをもう少し工夫して緊張感?が出せたら良かったのですが力不足でした。
没画像#3です。

没画像#2の勢いが残っていたので?ロボが飛んでます。 この構図だと背景に入れる物が思い浮かばなかったので、テスト作画したら早々と諦めました。ポーズは好きなんですけどね。

空を飛ぶ宇宙船群をそのまま作画したところ、背景の山と宇宙船の質感が違い過ぎて浮いて(目立って)しまいました。 そこで思いついたのが、宇宙船群とロボの間に半透明の青いスクリーンを置く事でした。スクリーンは面数=1の板を使い、色は濃い青、反射=0、光沢=0、透明度=70%にしてみました。 まぁ、やらないよりは大分マシな程度かもしれませんが、後者の背景の方が確実に「馴染む絵」になりました。 あとは、もう少しSSR自体の画面に占める割合を大きくした方が迫力が出せたかも、と思います。手持ち装備を銃身の短いデザインに変更したのはその為だったのですが。。。 スケール感を出す常套手段で、足元に人物を配置すると大きさが判りやすいのですが、ロボの足元にくる人物の上手い設定が直には思いつきませんでした。
それにしても、今回の宇宙船の様な「作り置きのストック」が有ると助かりますネ。
(Last)
























コメント